Radu Corcodel

- Phone: 617-621-7578
- Email:
-
Position:
Research / Technical Staff
Principal Research Scientist -
Education:
Ph.D., University of Connecticut, 2017 -
Research Areas:
External Links:
Radu's Quick Links
-
Biography
Radu's PhD focused on workspace analysis and motion synthesis for arbitrary kinematic chains, with particular emphasis on robotic 3D printing and Fusion Deposition Modeling. Between 2007-2011, Radu worked for Siemens VDO (currently Continental, AG) as a Design Architect, where he contributed to the development and production of high-power DC/DC inverters for hybrid vehicles and digital tachographs for commercial vehicles. Currently his research focuses on motion planning and workspace analysis for over-actuated kinematic linkages and collaborative robots.
-
Recent News & Events
-
NEWS MERL researchers present 9 papers at IEEE ICRA 2026 Date: June 1, 2026 - June 5, 2026
Where: Vienna, Austria
MERL Contacts: Radu Corcodel; Stefano Di Cairano; Purnanand Elango; Siddarth Jain; Alexander Schperberg; Kento Tomita
Research Areas: Artificial Intelligence, Computer Vision, Control, Dynamical Systems, Machine Learning, Optimization, RoboticsBrief- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
IEEE ICRA is the flagship conference of the IEEE Robotics and Automation Society and the world’s largest and most comprehensive technical conference focused on research advances and the latest technological developments in robotics. The event attracts nearly 8,000 participants and receives more than 5,000 paper submissions.
- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
-
NEWS MERL Researchers at NeurIPS 2025 presented 2 conference papers, 5 workshop papers, and organized a workshop. Date: December 2, 2025 - December 7, 2025
Where: San Diego
MERL Contacts: Petros T. Boufounos; Anoop Cherian; Radu Corcodel; Stefano Di Cairano; Chiori Hori; Christopher R. Laughman; Suhas Lohit; Pedro Miraldo; Saviz Mowlavi; Kuan-Chuan Peng; Arvind Raghunathan; Abraham P. Vinod; Pu (Perry) Wang
Research Areas: Artificial Intelligence, Computational Sensing, Computer Vision, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, Robotics, Signal Processing, Speech & AudioBrief- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
Main Conference Papers:
1) Sorachi Kato, Ryoma Yataka, Pu Wang, Pedro Miraldo, Takuya Fujihashi, and Petros Boufounos, "RAPTR: Radar-based 3D Pose Estimation using Transformer", Code available at: https://github.com/merlresearch/radar-pose-transformer
2) Runyu Zhang, Arvind Raghunathan, Jeff Shamma, and Na Li, "Constrained Optimization From a Control Perspective via Feedback Linearization"
Workshop Papers:
1) Yuyou Zhang, Radu Corcodel, Chiori Hori, Anoop Cherian, and Ding Zhao, "SpinBench: Perspective and Rotation as a Lens on Spatial Reasoning in VLMs", NeuriIPS 2025 Workshop on SPACE in Vision, Language, and Embodied AI (SpaVLE) (Best Paper Runner-up)
2) Xiaoyu Xie, Saviz Mowlavi, and Mouhacine Benosman, "Smooth and Sparse Latent Dynamics in Operator Learning with Jerk Regularization", Workshop on Machine Learning and the Physical Sciences (ML4PS)
3) Spencer Hutchinson, Abraham Vinod, François Germain, Stefano Di Cairano, Christopher Laughman, and Ankush Chakrabarty, "Quantile-SMPC for Grid-Interactive Buildings with Multivariate Temporal Fusion Transformers", Workshop on UrbanAI: Harnessing Artificial Intelligence for Smart Cities (UrbanAI)
4) Yuki Shirai, Kei Ota, Devesh Jha, and Diego Romeres, "Sim-to-Real Contact-Rich Pivoting via Optimization-Guided RL with Vision and Touch", Worskhop on Embodied World Models for Decision Making
5) Mark Van der Merwe and Devesh Jha, "In-Context Policy Iteration for Dynamic Manipulation", Workshop on Embodied World Models for Decision Making
Workshop Organized:
MERL members co-organized the Multimodal Algorithmic Reasoning (MAR) Workshop (https://marworkshop.github.io/neurips25/). Organizers: Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Honglu Zhou (Salesforce AI Research), Kevin Smith (Massachusetts Institute of Technology), and Joshua B. Tenenbaum (Massachusetts Institute of Technology).
- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
See All News & Events for Radu -
-
Awards
-
AWARD Honorable Mention Award at NeurIPS 23 Instruction Workshop Date: December 15, 2023
Awarded to: Lingfeng Sun, Devesh K. Jha, Chiori Hori, Siddharth Jain, Radu Corcodel, Xinghao Zhu, Masayoshi Tomizuka and Diego Romeres
MERL Contacts: Radu Corcodel; Chiori Hori; Siddarth Jain
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- MERL Researchers received an "Honorable Mention award" at the Workshop on Instruction Tuning and Instruction Following at the NeurIPS 2023 conference in New Orleans. The workshop was on the topic of instruction tuning and Instruction following for Large Language Models (LLMs). MERL researchers presented their work on interactive planning using LLMs for partially observable robotic tasks during the oral presentation session at the workshop.
-
-
Research Highlights
-
MERL Publications
- , "FurnitureVLA: Learning Long-Horizon Bimanual Furniture Assembly with Vision-Language-Action Model", arXiv, July 2026.BibTeX arXiv
- @article{Ma2026jul,
- author = {Ma, Chenyang and Yang, Yue and Corcodel, Radu and Jain, Siddarth and Wu, Andrew and Hori, Chiori and Romeres, Diego},
- title = {{FurnitureVLA: Learning Long-Horizon Bimanual Furniture Assembly with Vision-Language-Action Model}},
- journal = {arXiv},
- year = 2026,
- month = jul,
- url = {https://arxiv.org/abs/2607.01212}
- }
- , "M-VTOP: Modular Visuo-Tactile Object Pose Estimation for High-Precision Robotic Manipulation", 2026 IEEE International Conference on Robotics & Automation (ICRA), June 2026.BibTeX TR2026-070 PDF
- @inproceedings{Oller2026jun,
- author = {Oller, Miquel and Qian, Qiyang and Corcodel, Radu and Jain, Siddarth},
- title = {{M-VTOP: Modular Visuo-Tactile Object Pose Estimation for High-Precision Robotic Manipulation}},
- booktitle = {2026 IEEE International Conference on Robotics \& Automation (ICRA)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-070}
- }
- , "GRAM: Generalization in Deep RL with a Robust Adaptation Module", IEEE Robotics and Automation Letters (RA-L), May 2026.BibTeX TR2026-057 PDF
- @article{Queeney2026may,
- author = {Queeney, James and Cai, Xiaoyi and Schperberg, Alexander and Corcodel, Radu and Benosman, Mouhacine and How, Jonathan},
- title = {{GRAM: Generalization in Deep RL with a Robust Adaptation Module}},
- journal = {IEEE Robotics and Automation Letters (RA-L)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-057}
- }
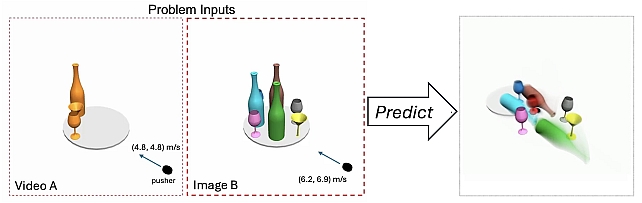
- , "LLMPhy: Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines", International Conference on Artificial Intelligence and Statistics (AISTATS), May 2026.BibTeX TR2026-052 PDF Data Software
- @inproceedings{Cherian2026may,
- author = {Cherian, Anoop and Corcodel, Radu and Jain, Siddarth and Romeres, Diego},
- title = {{LLMPhy: Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines}},
- booktitle = {International Conference on Artificial Intelligence and Statistics (AISTATS)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-052}
- }
- , "SpinBench: 3D Rotation as a Lens on Spatial Reasoning in VLMs", International Conference on Learning Representations (ICLR) 2026, April 2026.BibTeX TR2026-045 PDF
- @inproceedings{Zhang2026apr2,
- author = {Zhang, Yuyou and Corcodel, Radu and Hori, Chiori and Cherian, Anoop and Zhao, Ding},
- title = {{SpinBench: 3D Rotation as a Lens on Spatial Reasoning in VLMs}},
- booktitle = {International Conference on Learning Representations (ICLR) 2026},
- year = 2026,
- month = apr,
- url = {https://www.merl.com/publications/TR2026-045}
- }
- , "FurnitureVLA: Learning Long-Horizon Bimanual Furniture Assembly with Vision-Language-Action Model", arXiv, July 2026.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "High-Accuracy Tactile Pose Estimation for Electronic Connector Assembly"
Inventors: Corcodel, Radu Ioan; Bronars, Antonia; Jha, Devesh
Patent No.: 12,636,789
Issue Date: May 26, 2026 -
Title: "Method and System for Generating a Sequence of Actions for Controlling a Robot"
Inventors: Hori, Chiori; Le Roux, Jonathan; Jha, Devesh; Jain, Siddarth; Corcodel, Radu Ioan; Romeres, Diego; Peng, Puyuang; Liu, Xinyu; Harwath, David
Patent No.: 12,613,523
Issue Date: Apr 28, 2026 -
Title: "System and Method for Controlling a Robot using Constrained Dynamic Movement Primitives"
Inventors: Jha, Devesh; Shaw, Seiji; Raghunathan, Arvind U.; Corcodel, Radu Ioan; Romeres, Diego; Nikovski, Daniel N.
Patent No.: 12,343,876
Issue Date: Jul 1, 2025 -
Title: "Simulation-in-the-loop Tuning of Robot Parameters for System Modeling and Control"
Inventors: Jain, Siddarth; Van Baar, Jeroen; Corcodel, Radu Ioan; Sullivan, Alan; Benosman, Mouhacine
Patent No.: 11,975,451
Issue Date: May 7, 2024 -
Title: "Interactive Tactile Perception Method for Classification and Recognition of Object Instances"
Inventors: Corcodel, Radu Ioan; Jain, Siddarth; van Baar, Jeroen
Patent No.: 11,794,350
Issue Date: Oct 24, 2023 -
Title: "Apparatus and Method for Planning Contact-Interaction Trajectories"
Inventors: Onol, Aykut; Corcodel, Radu Ioan
Patent No.: 11,548,150
Issue Date: Jan 10, 2023 -
Title: "Detection, Tracking and 3D Modeling of Objects with Sparse RGB-D SLAM and Interactive Perception"
Inventors: Marcal de Almeida, Diogo Rodrigues; Corcodel, Radu Ioan
Patent No.: 10,977,480
Issue Date: Apr 13, 2021 -
Title: "System for Training Descriptor with Active Sample Selection"
Inventors: Kocanaogullari, Aziz; Cansizoglu, Esra; Corcodel, Radu Ioan
Patent No.: 10,810,468
Issue Date: Oct 20, 2020
-
Title: "High-Accuracy Tactile Pose Estimation for Electronic Connector Assembly"