Arvind Raghunathan

- Phone: 617-621-7502
- Email:
-
Position:
Research / Technical Staff
Senior Principal Research Scientist,
Senior Team Leader -
Education:
Ph.D., Carnegie Mellon University, 2004 -
Research Areas:
External Links:
Arvind's Quick Links
-
Biography
Arvind's research focuses on algorithms for optimization of large-scale nonlinear and mixed integer nonlinear programs with applications in power grid, transportation systems and model-based control of processes. He previously worked at the United Technologies Research Center for 7 years developing optimization algorithms for aerospace, elevator, energy systems and security businesses.
-
Recent News & Events
-
NEWS MERL Researchers at NeurIPS 2025 presented 2 conference papers, 5 workshop papers, and organized a workshop. Date: December 2, 2025 - December 7, 2025
Where: San Diego
MERL Contacts: Petros T. Boufounos; Anoop Cherian; Radu Corcodel; Stefano Di Cairano; Chiori Hori; Christopher R. Laughman; Suhas Lohit; Pedro Miraldo; Saviz Mowlavi; Kuan-Chuan Peng; Arvind Raghunathan; Abraham P. Vinod; Pu (Perry) Wang
Research Areas: Artificial Intelligence, Computational Sensing, Computer Vision, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, Robotics, Signal Processing, Speech & AudioBrief- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
Main Conference Papers:
1) Sorachi Kato, Ryoma Yataka, Pu Wang, Pedro Miraldo, Takuya Fujihashi, and Petros Boufounos, "RAPTR: Radar-based 3D Pose Estimation using Transformer", Code available at: https://github.com/merlresearch/radar-pose-transformer
2) Runyu Zhang, Arvind Raghunathan, Jeff Shamma, and Na Li, "Constrained Optimization From a Control Perspective via Feedback Linearization"
Workshop Papers:
1) Yuyou Zhang, Radu Corcodel, Chiori Hori, Anoop Cherian, and Ding Zhao, "SpinBench: Perspective and Rotation as a Lens on Spatial Reasoning in VLMs", NeuriIPS 2025 Workshop on SPACE in Vision, Language, and Embodied AI (SpaVLE) (Best Paper Runner-up)
2) Xiaoyu Xie, Saviz Mowlavi, and Mouhacine Benosman, "Smooth and Sparse Latent Dynamics in Operator Learning with Jerk Regularization", Workshop on Machine Learning and the Physical Sciences (ML4PS)
3) Spencer Hutchinson, Abraham Vinod, François Germain, Stefano Di Cairano, Christopher Laughman, and Ankush Chakrabarty, "Quantile-SMPC for Grid-Interactive Buildings with Multivariate Temporal Fusion Transformers", Workshop on UrbanAI: Harnessing Artificial Intelligence for Smart Cities (UrbanAI)
4) Yuki Shirai, Kei Ota, Devesh Jha, and Diego Romeres, "Sim-to-Real Contact-Rich Pivoting via Optimization-Guided RL with Vision and Touch", Worskhop on Embodied World Models for Decision Making
5) Mark Van der Merwe and Devesh Jha, "In-Context Policy Iteration for Dynamic Manipulation", Workshop on Embodied World Models for Decision Making
Workshop Organized:
MERL members co-organized the Multimodal Algorithmic Reasoning (MAR) Workshop (https://marworkshop.github.io/neurips25/). Organizers: Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Honglu Zhou (Salesforce AI Research), Kevin Smith (Massachusetts Institute of Technology), and Joshua B. Tenenbaum (Massachusetts Institute of Technology).
- MERL researchers presented 2 main-conference papers and 5 workshop papers, as well as organized a workshop, at NeurIPS 2025.
-
NEWS MERL contributes to ICRA 2025 Date: May 19, 2025 - May 23, 2025
Where: IEEE ICRA
MERL Contacts: Stefano Di Cairano; Jianlin Guo; Chiori Hori; Siddarth Jain; Toshiaki Koike-Akino; Philip V. Orlik; Arvind Raghunathan; Abraham P. Vinod; Yebin Wang
Research Areas: Artificial Intelligence, Computer Vision, Control, Dynamical Systems, Machine Learning, Optimization, Robotics, Human-Computer InteractionBrief- MERL made significant contributions to both the organization and the technical program of the International Conference on Robotics and Automation (ICRA) 2025, which was held in Atlanta, Georgia, USA, from May 19th to May 23rd.
MERL was a Bronze sponsor of the conference, and MERL researchers chaired four sessions in the areas of Manipulation Planning, Human-Robot Collaboration, Diffusion Policy, and Learning for Robot Control.
MERL researchers presented four papers in the main conference on the topics of contact-implicit trajectory optimization, proactive robotic assistance in human-robot collaboration, diffusion policy with human preferences, and dynamic and model learning of robotic manipulators. In addition, five more papers were presented in the workshops: “Structured Learning for Efficient, Reliable, and Transparent Robots,” “Safely Leveraging Vision-Language Foundation Models in Robotics: Challenges and Opportunities,” “Long-term Human Motion Prediction,” and “The Future of Intelligent Manufacturing: From Innovation to Implementation.”
MERL researcher Diego Romeres delivered an invited talk titled “Dexterous Robotics: From Multimodal Sensing to Real-World Physical Interactions.”
MERL also collaborated with the University of Padua on one of the conference’s challenges: the “3rd AI Olympics with RealAIGym” (https://ai-olympics.dfki-bremen.de).
During the conference, MERL researchers received the IEEE Transactions on Automation Science and Engineering Best New Application Paper Award for their paper titled “Smart Actuation for End-Edge Industrial Control Systems.”
About ICRA
The IEEE International Conference on Robotics and Automation (ICRA) is the flagship conference of the IEEE Robotics and Automation Society and the world’s largest and most comprehensive technical conference focused on research advances and the latest technological developments in robotics. The event attracts over 7,000 participants, 143 partners and exhibitors, and receives more than 4,000 paper submissions.
- MERL made significant contributions to both the organization and the technical program of the International Conference on Robotics and Automation (ICRA) 2025, which was held in Atlanta, Georgia, USA, from May 19th to May 23rd.
See All News & Events for Arvind -
-
Awards
-
AWARD Mitsubishi Electric and MERL work recognized with IEEJ Distinguished Paper Award Date: June 1, 2025
Awarded to: Arvind Raghunathan, Daniel Nikovski
MERL Contacts: Daniel N. Nikovski; Arvind Raghunathan
Research Areas: Electric Systems, OptimizationBrief- A publication jointly authored by Mitsubishi Electric Corporation's Advanced Technology Center (ATC) and MERL researchers has been recognized with the 2025 IEEJ Distinguished Paper Award by the Institute of Electrical Engineers Japan. The paper titled "Power Band Model Based on Flow Network and Weekly Unit Commitment Problem Considering Reserve Market" published in the IEEJ Transactions on Power and Energy presents a novel Unit Commitment formulation for scheduling the generator operations. Arvind Raghunathan and Daniel Nikovksi were co-authors on this publication.
-
AWARD MERL Researchers Win Best Workshop Poster Award at the 2023 IEEE International Conference on Robotics and Automation (ICRA) Date: June 2, 2023
Awarded to: Yuki Shirai, Devesh Jha, Arvind Raghunathan and Dennis Hong
MERL Contact: Arvind Raghunathan
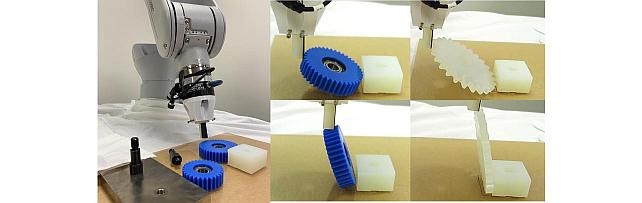
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
The paper presents a technique to manipulate an object using a tool in a closed-loop fashion using vision-based tactile sensors. More information about the workshop and the various speakers can be found here https://sites.google.com/view/icra2023embracingcontacts/home.
- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
-
AWARD Arvind Raghunathan receives Roberto Tempo Best CDC Paper Award at 2022 IEEE Conference on Decision & Control (CDC) Date: December 8, 2022
Awarded to: Arvind Raghunathan
MERL Contact: Arvind Raghunathan
Research Areas: Control, OptimizationBrief- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
The award is given annually in honor of Roberto Tempo, the 44th President of the IEEE Control Systems Society (CSS). The Tempo Award Committee selects the best paper from the previous year's CDC based on originality, potential impact on any aspect of control theory, technology, or implementation, and for the clarity of writing. This year's award committee was headed by Prof. Patrizio Colaneri, Politecnico di Milano. Arvind's paper was nominated for the award by Prof. Lorenz Biegler, Carnegie Mellon University, with supporting letters from Prof. Andreas Waechter, Northwestern University, and Prof. Victor Zavala, University of Wisconsin-Madison.
- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
-
-
MERL Publications
- , "Adaptive Hybrid Prediction-Correction with Trust-Region and Dynamic Line Search for AC/DC Load Flow", IEEE Transactions on Power Delivery, DOI: 10.1109/TPWRD.2026.3664002, Vol. 41, No. 3, pp. 1192-1203, May 2026.BibTeX TR2026-067 PDF
- @article{Singh2026may,
- author = {Singh, Deepi and Sun, Hongbo and Kawano, Shunsuke and Raghunathan, Arvind and Takaguchi, Yusuke and Luo, Fang},
- title = {{Adaptive Hybrid Prediction-Correction with Trust-Region and Dynamic Line Search for AC/DC Load Flow}},
- journal = {IEEE Transactions on Power Delivery},
- year = 2026,
- volume = 41,
- number = 3,
- pages = {1192--1203},
- month = may,
- doi = {10.1109/TPWRD.2026.3664002},
- url = {https://www.merl.com/publications/TR2026-067}
- }
- , "Temporal Surrogate Lagrangian Decomposition for Operational Hosting Capacity Assessment In Unbalanced Power Distribution Systems", IEEE Transactions on Industrial Informatics, DOI: 10.1109/TII.2025.3650721, February 2026.BibTeX TR2026-025 PDF
- @article{Qin2026feb,
- author = {Qin, Jingtao and Sun, Hongbo and Yu, Nanpeng and Guo, Jianlin and Wang, Ye and Raghunathan, Arvind},
- title = {{Temporal Surrogate Lagrangian Decomposition for Operational Hosting Capacity Assessment In Unbalanced Power Distribution Systems}},
- journal = {IEEE Transactions on Industrial Informatics},
- year = 2026,
- month = feb,
- doi = {10.1109/TII.2025.3650721},
- url = {https://www.merl.com/publications/TR2026-025}
- }
- , "Constructing Tight Quadratic Relaxations for Global Optimization: I. Outer-Approximating Twice-Differentiable Convex Functions", Journal of Global Optimization, December 2025.BibTeX TR2026-086 PDF
- @article{Strahl2025dec2,
- author = {Strahl, William and Raghunathan, Arvind and Sahinidis, Nikolaos V. and Gounaris, Chrysanthose},
- title = {{Constructing Tight Quadratic Relaxations for Global Optimization: I. Outer-Approximating Twice-Differentiable Convex Functions}},
- journal = {Journal of Global Optimization},
- year = 2025,
- month = dec,
- url = {https://www.merl.com/publications/TR2026-086}
- }
- , "Constructing Tight Quadratic Relaxations for Global Optimization: II. Underestimating Difference-of-Convex (D.C.) Functions", Journal of Global Optimization, December 2025.BibTeX TR2026-085 PDF
- @article{Strahl2025dec,
- author = {Strahl, William and Raghunathan, Arvind and Sahinidis, Nikolaos V. and Gounaris, Chrysanthose},
- title = {{Constructing Tight Quadratic Relaxations for Global Optimization: II. Underestimating Difference-of-Convex (D.C.) Functions}},
- journal = {Journal of Global Optimization},
- year = 2025,
- month = dec,
- url = {https://www.merl.com/publications/TR2026-085}
- }
- , "Constrained Optimization From a Control Perspective via Feedback Linearization", The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NuerIPS), December 2025.BibTeX TR2025-165 PDF
- @inproceedings{Zhang2025dec,
- author = {Zhang, Runyu and Raghunathan, Arvind and Shamma, Jeff and Li, Na},
- title = {{Constrained Optimization From a Control Perspective via Feedback Linearization}},
- booktitle = {The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NuerIPS)},
- year = 2025,
- month = dec,
- url = {https://www.merl.com/publications/TR2025-165}
- }
- , "Adaptive Hybrid Prediction-Correction with Trust-Region and Dynamic Line Search for AC/DC Load Flow", IEEE Transactions on Power Delivery, DOI: 10.1109/TPWRD.2026.3664002, Vol. 41, No. 3, pp. 1192-1203, May 2026.
-
Other Publications
- , "Global Optimization of Nonlinear Network Design", SIAM Journal on Optimization, Vol. 23, No. 1, pp. 268-295, 2013.BibTeX
- @Article{raghunathan2013global,
- author = {Raghunathan, Arvind U},
- title = {Global Optimization of Nonlinear Network Design},
- journal = {SIAM Journal on Optimization},
- year = 2013,
- volume = 23,
- number = 1,
- pages = {268--295},
- publisher = {Society for Industrial and Applied Mathematics}
- }
- , "A distributed anytime algorithm for maximizing occupant comfort", American Control Conference (ACC), 2012, pp. 1059-1066.BibTeX
- @Inproceedings{raghunathan2012distributed,
- author = {Raghunathan, Arvind U and Krishnamurthy, Sudha},
- title = {A distributed anytime algorithm for maximizing occupant comfort},
- booktitle = {American Control Conference (ACC)},
- year = 2012,
- pages = {1059--1066},
- organization = {IEEE}
- }
- , "Parametric Characterization of Multimodal Distributions with Non-Gaussian Modes", IEEE 11th International Conference on Data Mining Workshops (ICDMW), 2011, pp. 286-292.BibTeX
- @Inproceedings{tewari2011parametric,
- author = {Tewari, Ashutosh and Giering, Michael J and Raghunathan, Arvind},
- title = {Parametric Characterization of Multimodal Distributions with Non-{G}aussian Modes},
- booktitle = {IEEE 11th International Conference on Data Mining Workshops (ICDMW)},
- year = 2011,
- pages = {286--292},
- organization = {IEEE}
- }
- , "Transfer operator method for control in fluid flows", Proceedings of the 48th IEEE Conference on Decision and Control, held jointly with the 28th Chinese Control Conference (CDC/CCC), 2009, pp. 1806-1811.BibTeX
- @Inproceedings{vaidya2009transfer,
- author = {Vaidya, Umesh and Ganapathysubramanian, Baskar and Raghunathan, Arvind},
- title = {Transfer operator method for control in fluid flows},
- booktitle = {Proceedings of the 48th IEEE Conference on Decision and Control, held jointly with the 28th Chinese Control Conference (CDC/CCC)},
- year = 2009,
- pages = {1806--1811},
- organization = {IEEE}
- }
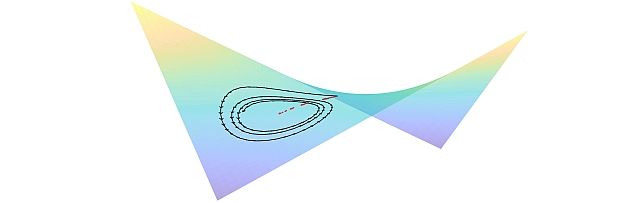
- , "Lyapunov measure and control of periodic orbit", IEEE International Conference on Electro/Information Technology (EIT), 2008, pp. 48-53.BibTeX
- @Inproceedings{diwadkar2008lyapunov,
- author = {Diwadkar, A and Vaidya, U and Raghunathan, AU},
- title = {Lyapunov measure and control of periodic orbit},
- booktitle = {IEEE International Conference on Electro/Information Technology (EIT)},
- year = 2008,
- pages = {48--53},
- organization = {IEEE}
- }
- , "Optimal stabilization using Lyapunov measure", American Control Conference (ACC), 2008, pp. 1746-1751.BibTeX
- @Inproceedings{raghunathan2008optimal,
- author = {Raghunathan, Arvind U and Vaidya, Umesh},
- title = {Optimal stabilization using {L}yapunov measure},
- booktitle = {American Control Conference (ACC)},
- year = 2008,
- pages = {1746--1751},
- organization = {IEEE}
- }
- , "MILP and NLP techniques for centralized trajectory planning of multiple unmanned air vehicles", American Control Conference (ACC), 2006.BibTeX
- @Inproceedings{borrelli2006milp,
- author = {Borrelli, Francesco and Subramanian, Dharmashankar and Raghunathan, Arvind U and Biegler, Lorenz T},
- title = {{MILP} and {NLP} techniques for centralized trajectory planning of multiple unmanned air vehicles},
- booktitle = {American Control Conference (ACC)},
- year = 2006,
- organization = {IEEE}
- }
- , "Parameter estimation in metabolic flux balance models for batch fermentation - Formulation & Solution using Differential Variational Inequalities (DVIs)", Annals of Operations Research, Vol. 148, No. 1, pp. 251-270, 2006.BibTeX
- @Article{raghunathan2006parameter,
- author = {Raghunathan, Arvind U and Perez-Correa, J Ricardo and Agosin, Eduardo and Biegler, Lorenz T},
- title = {Parameter estimation in metabolic flux balance models for batch fermentation - Formulation & Solution using Differential Variational Inequalities ({DVI}s)},
- journal = {Annals of Operations Research},
- year = 2006,
- volume = 148,
- number = 1,
- pages = {251--270},
- publisher = {Springer}
- }
- , "An interior point method for mathematical programs with complementarity constraints (MPCCs)", SIAM Journal on Optimization, Vol. 15, No. 3, pp. 720-750, 2005.BibTeX
- @Article{raghunathan2005interior,
- author = {Raghunathan, Arvind U and Biegler, Lorenz T},
- title = {An interior point method for mathematical programs with complementarity constraints ({MPCC}s)},
- journal = {SIAM Journal on Optimization},
- year = 2005,
- volume = 15,
- number = 3,
- pages = {720--750},
- publisher = {Philadelphia, Pa.: The Society, c1991-}
- }
- , "Dynamic optimization strategies for three-dimensional conflict resolution of multiple aircraft", Journal of guidance, control, and dynamics, Vol. 27, No. 4, pp. 586-594, 2004.BibTeX
- @Article{raghunathan2004dynamic,
- author = {Raghunathan, Arvind U and Gopal, Vipin and Subramanian, Dharmashankar and Biegler, Lorenz T and Samad, Tariq},
- title = {Dynamic optimization strategies for three-dimensional conflict resolution of multiple aircraft},
- journal = {Journal of guidance, control, and dynamics},
- year = 2004,
- volume = 27,
- number = 4,
- pages = {586--594},
- publisher = {American Institute of Aeronautics and Astronautics}
- }
- , "An MPEC formulation for dynamic optimization of distillation operations", Computers & chemical engineering, Vol. 28, No. 10, pp. 2037-2052, 2004.BibTeX
- @Article{raghunathan2004mpec,
- author = {Raghunathan, Arvind U and Soledad Diaz, M and Biegler, Lorenz T},
- title = {An {MPEC} formulation for dynamic optimization of distillation operations},
- journal = {Computers & chemical engineering},
- year = 2004,
- volume = 28,
- number = 10,
- pages = {2037--2052},
- publisher = {Elsevier}
- }
- , "A comparison between mixed integer programming and nonlinear programming techniques for 3d conflict resolution of multiple aircraft," Tech. Rep., Department of Aerospace Engineering and Mechanics, University of Minnesota, 2003.BibTeX
- @Techreport{borrelli2003comparison,
- author = {Borrelli, F and Subramanian, D and Raghunathan, AU and Biegler, LT and Samad, T},
- title = {A comparison between mixed integer programming and nonlinear programming techniques for 3d conflict resolution of multiple aircraft},
- institution = {Department of Aerospace Engineering and Mechanics, University of Minnesota},
- year = 2003,
- address = {Minnesota, Minneapolis}
- }
- , "3D conflict resolution of multiple aircraft via dynamic optimization", AIAA Guidance, Navigation, and Control Conference and Exhibit (AIAA), 2003.BibTeX
- @Inproceedings{raghunathan20033d,
- author = {Raghunathan, Arvind U and Gopal, Vipin and Subramanian, Dharmashankar and Biegler, Lorenz T and Samad, Tariq},
- title = {3D conflict resolution of multiple aircraft via dynamic optimization},
- booktitle = {AIAA Guidance, Navigation, and Control Conference and Exhibit (AIAA)},
- year = 2003
- }
- , "Data reconciliation and parameter estimation in flux-balance analysis", Biotechnology and bioengineering, Vol. 84, No. 6, pp. 700-709, 2003.BibTeX
- @Article{raghunathan2003data,
- author = {Raghunathan, Arvind U and Perez-Correa, J Ricardo and Bieger, Lorenz T},
- title = {Data reconciliation and parameter estimation in flux-balance analysis},
- journal = {Biotechnology and bioengineering},
- year = 2003,
- volume = 84,
- number = 6,
- pages = {700--709},
- publisher = {Wiley Online Library}
- }
- , "Mathematical programs with equilibrium constraints (MPECs) in process engineering", Computers & chemical engineering, Vol. 27, No. 10, pp. 1381-1392, 2003.BibTeX
- @Article{raghunathan2003mathematical,
- author = {Raghunathan, Arvind U and Biegler, Lorenz T},
- title = {Mathematical programs with equilibrium constraints ({MPEC}s) in process engineering},
- journal = {Computers & chemical engineering},
- year = 2003,
- volume = 27,
- number = 10,
- pages = {1381--1392},
- publisher = {Elsevier}
- }
- , "Barrier methods for mathematical programs with complementarity constraints (MPCCs)," Tech. Rep., Carnegie Mellon University, Department of Chemical Engineering, 2002.BibTeX
- @Techreport{raghunathan2002barrier,
- author = {Raghunathan, A and Biegler, LT},
- title = {Barrier methods for mathematical programs with complementarity constraints ({MPCC}s)},
- institution = {Carnegie Mellon University, Department of Chemical Engineering},
- year = 2002
- }
- , "MPEC formulations and algorithms in process engineering", Computers and Chemical Engineering, Vol. 27, pp. 1381-1392, 2002.BibTeX
- @Article{raghunathan2002mpec,
- author = {Raghunathan, A and Biegler, LT},
- title = {{MPEC} formulations and algorithms in process engineering},
- journal = {Computers and Chemical Engineering},
- year = 2002,
- volume = 27,
- pages = {1381--1392}
- }
- , "Global Optimization of Nonlinear Network Design", SIAM Journal on Optimization, Vol. 23, No. 1, pp. 268-295, 2013.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "System and Method for Controlling a Fleet of Unmanned Aerial Vehicles Based on Multi-Stage Optimization"
Inventors: Raghunathan, Arvind U.; Sahinoglu, Zafer; Bergman, David; Cire, Andre
Patent No.: 12,524,023
Issue Date: Jan 13, 2026 -
Title: "System and method for controlling an operation of a robotic arm"
Inventors: Jha, Devesh; Shirai, Yuki; Raghunathan, Arvind U.
Patent No.: 12,440,979
Issue Date: Oct 14, 2025 -
Title: "System and Method for Robust Pivoting for Re-Orienting Parts during Robotic Assembly"
Inventors: Jha, Devesh; Shirai, Yuki; Raghunathan, Arvind U.; Romeres, Diego
Patent No.: 12,397,425
Issue Date: Aug 26, 2025 -
Title: "Device for Controlling a System with Polynomial Dynamics"
Inventors: Raghunathan, Arvind U.
Patent No.: 12,366,834
Issue Date: Jul 22, 2025 -
Title: "System and Method for Controlling a Robot using Constrained Dynamic Movement Primitives"
Inventors: Jha, Devesh; Shaw, Seiji; Raghunathan, Arvind U.; Corcodel, Radu Ioan; Romeres, Diego; Nikovski, Daniel N.
Patent No.: 12,343,876
Issue Date: Jul 1, 2025 -
Title: "System and Method for Controlling an Operation of a Manipulation System"
Inventors: Jha, Devesh; Raghunathan, Arvind U.; Shirai, Yuki
Patent No.: 12,343,875
Issue Date: Jul 1, 2025 -
Title: "System and Method for Controlling an Operation of a Machine According to a Task"
Inventors: Raghunathan, Arvind U.
Patent No.: 12,282,311
Issue Date: Apr 22, 2025 -
Title: "Systems and Methods for Group Elevator Scheduling Based on Quadratic Semi-Assignment Programs"
Inventors: Raghunathan, Arvind U
Patent No.: 12,077,412
Issue Date: Sep 3, 2024 -
Title: "System and Method for Robust Robotic Manipulation using Chance Constrained Optimization"
Inventors: Jha, Devesh; Raghunathan, Arvind U.; Romeres, Diego
Patent No.: 12,049,007
Issue Date: Jul 30, 2024 -
Title: "OBJECT MANIPULATION WITH COLLISION AVOIDANCE USING COMPLEMENTARITY CONSTRAINTS"
Inventors: Raghunathan, Arvind U.; Jha, Devesh; Romeres, Diego
Patent No.: 11,883,962
Issue Date: Jan 30, 2024 -
Title: "Device for Controlling a System with Polynomial Dynamics"
Inventors: Raghunathan, Arvind U.; Nohra, Carlos
Patent No.: 11,782,402
Issue Date: Oct 10, 2023 -
Title: "Method and System for Circuiting in Heat Exchangers"
Inventors: Raghunathan, Arvind U; Laughman, Christopher
Patent No.: 11,704,447
Issue Date: Jul 18, 2023 -
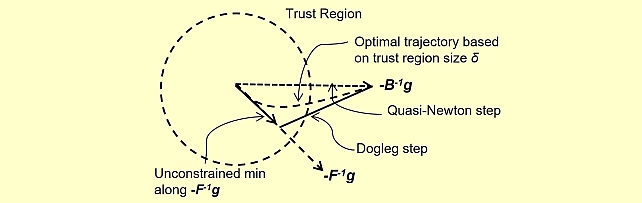
Title: "System and Method for Policy Optimization using Quasi-Newton Trust Region Method"
Inventors: Jha, Devesh; Raghunathan, Arvind U; Romeres, Diego
Patent No.: 11,650,551
Issue Date: May 16, 2023 -
Title: "System and Method for Scheduling Multiple Modes of Transport with Incomplete Information"
Inventors: Serra, Thiago; Raghunathan, Arvind U; Bergman, David
Patent No.: 11,085,781
Issue Date: Aug 10, 2021 -
Title: "System and Method for Scheduling Electric Generators using Decision Diagrams"
Inventors: Raghunathan, Arvind U; Bergman, David; Hashimoto, Hiroyuki
Patent No.: 10,969,750
Issue Date: Apr 6, 2021 -
Title: "Systems and Methods for Resource Allocation for Management Systems"
Inventors: Raghunathan, Arvind U; Bergman, David; Sahinidis, Nikolaos V
Patent No.: 10,362,139
Issue Date: Jul 23, 2019 -
Title: "Decentralized Control of Electricity Passing through Electrical Grid"
Inventors: Raghunathan, Arvind U
Patent No.: 10,243,361
Issue Date: Mar 26, 2019 -
Title: "Optimizing Operations of Multiple Air-Conditioning Units"
Inventors: Raghunathan, Arvind U; Nikovski, Daniel N.
Patent No.: 10,161,649
Issue Date: Dec 25, 2018 -
Title: "System and Method for Group Elevator Scheduling Based on Submodular Optimization"
Inventors: Nikovski, Daniel N.; Raghunathan, Arvind U; Ramalingam, Srikumar
Patent No.: 10,118,796
Issue Date: Nov 6, 2018 -
Title: "Optimal Parameter Selection and Acceleration in ADMM for Multi-stage Stochastic Convex Quadratic Programs"
Inventors: Raghunathan, Arvind U; Di Cairano, Stefano
Patent No.: 9,760,534
Issue Date: Sep 12, 2017 -
Title: "Method for Solving Quadratic Programs for Convex Sets with Linear Equalities by an Alternating Direction Method of Multipliers with Optimized Step Sizes"
Inventors: Raghunathan, Arvind U; Di Cairano, Stefano
Patent No.: 9,753,892
Issue Date: Sep 5, 2017 -
Title: "Method for Determining Object Poses Using Weighted Features"
Inventors: Tuzel, Oncel; Liu, Ming-Yu; Taguchi, Yuichi; Raghunathan, Arvind U
Patent No.: 9,280,827
Issue Date: Mar 8, 2016 -
Title: "System and Method for Optimal Power Flow Analysis"
Inventors: Raghunathan, Arvind U; Nikovski, Daniel N.; Gopalakrishnan, Ajit
Patent No.: 9,280,744
Issue Date: Mar 8, 2016 -
Title: "Method for Optimizing Power Flows in Electric Power Networks"
Inventors: Raghunathan, Arvind U; Gopalakrishnan, Ajit; Nikovski, Daniel N.
Patent No.: 9,184,589
Issue Date: Nov 10, 2015 -
Title: "Method for Globally Optimizing Power Flows in Electric Networks"
Inventors: Raghunathan, Arvind U.; Nikovski, Daniel N.
Patent No.: 9,093,842
Issue Date: Jul 28, 2015 -
Title: "System and Method for Optimizing Energy Consumption in Railway Systems with Energy Storage Devices"
Inventors: Raghunathan, Arvind U.; Xu, Yunwen; Wada, Toshihiro; Ueda, Kenji; Takahashi, Satoru
Patent No.: 8,983,690
Issue Date: Mar 17, 2015 -
Title: "System and Method for Optimizing Energy Consumption in Railway Systems"
Inventors: Raghunathan, Arvind U; Wada, Toshihiro; Ueda, Kenji; Takahashi, Satoru
Patent No.: 8,831,801
Issue Date: Sep 9, 2014 -
Title: "Method for Optimizing Power Flows in Electric Power Networks"
Inventors: Raghunathan, Arvind U
Patent No.: 8,756,556
Issue Date: Jun 17, 2014
-
Title: "System and Method for Controlling a Fleet of Unmanned Aerial Vehicles Based on Multi-Stage Optimization"