Siddarth Jain

- Phone: 617-621-7581
- Email:
-
Position:
Research / Technical Staff
Principal Research Scientist -
Education:
Ph.D., Northwestern University, 2019 -
Research Areas:
External Links:
Siddarth's Quick Links
-
Biography
Siddarth's research lies at the intersection of robotics, computer vision, and machine learning. His doctoral thesis investigated mathematical models for probabilistic human intent recognition, shared autonomy for assistive human-robot systems, and perception algorithms involving point cloud processing with geometric methods and machine learning. Prior to joining MERL in 2019, he was affiliated with the Shirley Ryan Abilitylab, Chicago (nation's top ranked physical medicine and rehabilitation research hospital) where his research lead to developments in the assistive robotics domain, involving user studies and interactive robotic systems that integrate perception, machine learning, planning, and control to act with people in practical applications. Currently, Siddarth's research focuses on the core challenges in active perception, robotic manipulation, autonomy, and human-robot interaction.
-
Recent News & Events
-
NEWS MERL contributes to ICRA 2025 Date: May 19, 2025 - May 23, 2025
Where: IEEE ICRA
MERL Contacts: Stefano Di Cairano; Jianlin Guo; Chiori Hori; Siddarth Jain; Toshiaki Koike-Akino; Philip V. Orlik; Arvind Raghunathan; Abraham P. Vinod; Yebin Wang
Research Areas: Artificial Intelligence, Computer Vision, Control, Dynamical Systems, Machine Learning, Optimization, Robotics, Human-Computer InteractionBrief- MERL made significant contributions to both the organization and the technical program of the International Conference on Robotics and Automation (ICRA) 2025, which was held in Atlanta, Georgia, USA, from May 19th to May 23rd.
MERL was a Bronze sponsor of the conference, and MERL researchers chaired four sessions in the areas of Manipulation Planning, Human-Robot Collaboration, Diffusion Policy, and Learning for Robot Control.
MERL researchers presented four papers in the main conference on the topics of contact-implicit trajectory optimization, proactive robotic assistance in human-robot collaboration, diffusion policy with human preferences, and dynamic and model learning of robotic manipulators. In addition, five more papers were presented in the workshops: “Structured Learning for Efficient, Reliable, and Transparent Robots,” “Safely Leveraging Vision-Language Foundation Models in Robotics: Challenges and Opportunities,” “Long-term Human Motion Prediction,” and “The Future of Intelligent Manufacturing: From Innovation to Implementation.”
MERL researcher Diego Romeres delivered an invited talk titled “Dexterous Robotics: From Multimodal Sensing to Real-World Physical Interactions.”
MERL also collaborated with the University of Padua on one of the conference’s challenges: the “3rd AI Olympics with RealAIGym” (https://ai-olympics.dfki-bremen.de).
During the conference, MERL researchers received the IEEE Transactions on Automation Science and Engineering Best New Application Paper Award for their paper titled “Smart Actuation for End-Edge Industrial Control Systems.”
About ICRA
The IEEE International Conference on Robotics and Automation (ICRA) is the flagship conference of the IEEE Robotics and Automation Society and the world’s largest and most comprehensive technical conference focused on research advances and the latest technological developments in robotics. The event attracts over 7,000 participants, 143 partners and exhibitors, and receives more than 4,000 paper submissions.
- MERL made significant contributions to both the organization and the technical program of the International Conference on Robotics and Automation (ICRA) 2025, which was held in Atlanta, Georgia, USA, from May 19th to May 23rd.
-
EVENT MERL Contributes to ICASSP 2025 Date: Sunday, April 6, 2025 - , April 11, 2025
Location: Hyderabad, India
MERL Contacts: Wael H. Ali; Petros T. Boufounos; Radu Corcodel; Chiori Hori; Siddarth Jain; Toshiaki Koike-Akino; Jonathan Le Roux; Yanting Ma; Hassan Mansour; Yoshiki Masuyama; Joshua Rapp; Anthony Vetro; Pu (Perry) Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Electronic and Photonic Devices, Machine Learning, Robotics, Signal Processing, Speech & AudioBrief- MERL has made numerous contributions to both the organization and technical program of ICASSP 2025, which is being held in Hyderabad, India from April 6-11, 2025.
Sponsorship
MERL is proud to be a Silver Patron of the conference and will participate in the student job fair on Thursday, April 10. Please join this session to learn more about employment opportunities at MERL, including openings for research scientists, post-docs, and interns.
MERL is pleased to be the sponsor of two IEEE Awards that will be presented at the conference. We congratulate Prof. Björn Erik Ottersten, the recipient of the 2025 IEEE Fourier Award for Signal Processing, and Prof. Shrikanth Narayanan, the recipient of the 2025 IEEE James L. Flanagan Speech and Audio Processing Award. Both awards will be presented in-person at ICASSP by Anthony Vetro, MERL President & CEO.
Technical Program
MERL is presenting 15 papers in the main conference on a wide range of topics including source separation, sound event detection, sound anomaly detection, speaker diarization, music generation, robot action generation from video, indoor airflow imaging, WiFi sensing, Doppler single-photon Lidar, optical coherence tomography, and radar imaging. Another paper on spatial audio will be presented at the Generative Data Augmentation for Real-World Signal Processing Applications (GenDA) Satellite Workshop.
MERL Researchers Petros Boufounos and Hassan Mansour will present a Tutorial on “Computational Methods in Radar Imaging” in the afternoon of Monday, April 7.
Petros Boufounos will also be giving an industry talk on Thursday April 10 at 12pm, on “A Physics-Informed Approach to Sensing".
About ICASSP
ICASSP is the flagship conference of the IEEE Signal Processing Society, and the world's largest and most comprehensive technical conference focused on the research advances and latest technological development in signal and information processing. The event has been attracting more than 4000 participants each year.
- MERL has made numerous contributions to both the organization and technical program of ICASSP 2025, which is being held in Hyderabad, India from April 6-11, 2025.
See All News & Events for Siddarth -
-
Awards
-
AWARD Honorable Mention Award at NeurIPS 23 Instruction Workshop Date: December 15, 2023
Awarded to: Lingfeng Sun, Devesh K. Jha, Chiori Hori, Siddharth Jain, Radu Corcodel, Xinghao Zhu, Masayoshi Tomizuka and Diego Romeres
MERL Contacts: Radu Corcodel; Chiori Hori; Siddarth Jain
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- MERL Researchers received an "Honorable Mention award" at the Workshop on Instruction Tuning and Instruction Following at the NeurIPS 2023 conference in New Orleans. The workshop was on the topic of instruction tuning and Instruction following for Large Language Models (LLMs). MERL researchers presented their work on interactive planning using LLMs for partially observable robotic tasks during the oral presentation session at the workshop.
-
-
Research Highlights
-
Internships with Siddarth
See All Internships at MERL -
MERL Publications
- , "VOLT: Vision and Language Trajectory Segmentation for Faster-than-Demonstration Policies", arXiv, June 2026.BibTeX arXiv
- @article{Sanchez2026jun,
- author = {Sanchez, Robert Ramirez and Evans, Daniel J. and Losey, Dylan P. and Jain, Siddarth},
- title = {{VOLT: Vision and Language Trajectory Segmentation for Faster-than-Demonstration Policies}},
- journal = {arXiv},
- year = 2026,
- month = jun,
- url = {https://arxiv.org/abs/2606.06323v2}
- }
- , "M-VTOP: Modular Visuo-Tactile Object Pose Estimation for High-Precision Robotic Manipulation", 2026 IEEE International Conference on Robotics & Automation (ICRA), June 2026.BibTeX TR2026-070 PDF
- @inproceedings{Oller2026jun,
- author = {Oller, Miquel and Qian, Qiyang and Corcodel, Radu and Jain, Siddarth},
- title = {{M-VTOP: Modular Visuo-Tactile Object Pose Estimation for High-Precision Robotic Manipulation}},
- booktitle = {2026 IEEE International Conference on Robotics \& Automation (ICRA)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-070}
- }
- , "SplatCtrl: Perception–Action Coupling via Gaussian Scene Representations and Reactive Robot Control", 2026 IEEE International Conference on Robotics & Automation (ICRA), June 2026.BibTeX TR2026-069 PDF
- @inproceedings{Jain2026jun,
- author = {{Jain, Siddarth and Choi, Ho Jin}},
- title = {{SplatCtrl: Perception–Action Coupling via Gaussian Scene Representations and Reactive Robot Control}},
- booktitle = {2026 IEEE International Conference on Robotics \& Automation (ICRA)},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-069}
- }
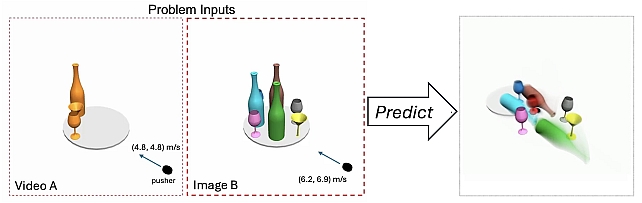
- , "LLMPhy: Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines", International Conference on Artificial Intelligence and Statistics (AISTATS), May 2026.BibTeX TR2026-052 PDF Data Software
- @inproceedings{Cherian2026may,
- author = {Cherian, Anoop and Corcodel, Radu and Jain, Siddarth and Romeres, Diego},
- title = {{LLMPhy: Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines}},
- booktitle = {International Conference on Artificial Intelligence and Statistics (AISTATS)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-052}
- }
- , "Real-time Human Progress Estimation with Online Dynamic Time Warping for Collaborative Robotics", Frontiers, December 2025.BibTeX TR2025-173 PDF
- @article{DeLazzari2025dec,
- author = {De Lazzari, Davide and Terreran, Matteo and Giacomuzzo, Giulio and Jain, Siddarth and Falco, Pietro and Carli, Ruggero and Ghidoni, Stefano and Romeres, Diego},
- title = {{Real-time Human Progress Estimation with Online Dynamic Time Warping for Collaborative Robotics}},
- journal = {Frontiers},
- year = 2025,
- month = dec,
- url = {https://www.merl.com/publications/TR2025-173}
- }
- , "VOLT: Vision and Language Trajectory Segmentation for Faster-than-Demonstration Policies", arXiv, June 2026.
-
Other Publications
- , "Probabilistic Human Intent Recognition for Shared Autonomy in Assistive Robotics", ACM Transactions on Human-Robot Interaction (THRI), 2019.BibTeX
- @Article{jain2019intent,
- author = {Jain, Siddarth and Argall, Brenna},
- title = {Probabilistic Human Intent Recognition for Shared Autonomy in Assistive Robotics},
- booktitle = {ACM Transactions on Human-Robot Interaction (THRI)},
- year = 2019,
- organization = {ACM}
- }
- , "Recursive Bayesian Human Intent Recognition in Shared-Control Robotics", In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.BibTeX
- @Inproceedings{jain2018recursive,
- author = {Jain, Siddarth and Argall, Brenna},
- title = {Recursive Bayesian Human Intent Recognition in Shared-Control Robotics},
- booktitle = {In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
- year = 2018,
- organization = {IEEE}
- }
- , "Human-in-the-loop optimization of shared autonomy in assistive robotics", IEEE robotics and automation letters, Vol. 2, No. 1, pp. 247-254, 2016.BibTeX
- @Article{gopinath2016human,
- author = {Gopinath, Deepak and Jain, Siddarth and Argall, Brenna D},
- title = {Human-in-the-loop optimization of shared autonomy in assistive robotics},
- journal = {IEEE robotics and automation letters},
- year = 2016,
- volume = 2,
- number = 1,
- pages = {247--254},
- publisher = {IEEE}
- }
- , "Grasp detection for assistive robotic manipulation", In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2016.BibTeX
- @Inproceedings{jain2016grasp,
- author = {Jain, Siddarth and Argall, Brenna},
- title = {Grasp detection for assistive robotic manipulation},
- booktitle = {In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2016,
- organization = {IEEE}
- }
- , "Assistive robotic manipulation through shared autonomy and a body-machine interface", In Proceedings of the IEEE international conference on rehabilitation robotics (ICORR), 2015.BibTeX
- @Inproceedings{jain2015assistive,
- author = {Jain, Siddarth and Farshchiansadegh, Ali and Broad, Alexander and Abdollahi, Farnaz and Mussa-Ivaldi, Ferdinando and Argall, Brenna},
- title = {Assistive robotic manipulation through shared autonomy and a body-machine interface},
- booktitle = {In Proceedings of the IEEE international conference on rehabilitation robotics (ICORR)},
- year = 2015,
- organization = {IEEE}
- }
- , "Automated and objective assessment of surgical training: detection of procedural steps on videotaped performances", In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), 2015.BibTeX
- @Inproceedings{jain2015automated,
- author = {Jain, Siddarth and Barsness, Katherine A and Argall, Brenna},
- title = {Automated and objective assessment of surgical training: detection of procedural steps on videotaped performances},
- booktitle = {In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA)},
- year = 2015,
- organization = {IEEE}
- }
- , "Automated perception of safe docking locations with alignment information for assistive wheelchairs", In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.BibTeX
- @Inproceedings{jain2014automated,
- author = {Jain, Siddarth and Argall, Brenna},
- title = {Automated perception of safe docking locations with alignment information for assistive wheelchairs},
- booktitle = {In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
- year = 2014,
- organization = {IEEE}
- }
- , "Probabilistic Human Intent Recognition for Shared Autonomy in Assistive Robotics", ACM Transactions on Human-Robot Interaction (THRI), 2019.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "Method and System for Generating a Sequence of Actions for Controlling a Robot"
Inventors: Hori, Chiori; Le Roux, Jonathan; Jha, Devesh; Jain, Siddarth; Corcodel, Radu Ioan; Romeres, Diego; Peng, Puyuang; Liu, Xinyu; Harwath, David
Patent No.: 12,613,523
Issue Date: Apr 28, 2026 -
Title: "Eye-on-Hand Reinforcement Learner for Dynamic Grasping with Active Pose Estimation"
Inventors: Jain, Siddarth; Huang, Baichuan; Yu, Jingjin
Patent No.: 12,583,111
Issue Date: Mar 24, 2026 -
Title: "System and Method for Controlling a Motion of a Robot"
Inventors: Lin, Chungwei; Wang, Yebin; Quirynen, Rien; Jha, Devesh; Wang, Bingnan; Vetterling, William; Jain, Siddarth; Bortoff, Scott A.
Patent No.: 12,257,718
Issue Date: Mar 25, 2025 -
Title: "Simulation-in-the-loop Tuning of Robot Parameters for System Modeling and Control"
Inventors: Jain, Siddarth; Van Baar, Jeroen; Corcodel, Radu Ioan; Sullivan, Alan; Benosman, Mouhacine
Patent No.: 11,975,451
Issue Date: May 7, 2024 -
Title: "Interactive Tactile Perception Method for Classification and Recognition of Object Instances"
Inventors: Corcodel, Radu Ioan; Jain, Siddarth; van Baar, Jeroen
Patent No.: 11,794,350
Issue Date: Oct 24, 2023
-
Title: "Method and System for Generating a Sequence of Actions for Controlling a Robot"