TR2022-057
PYROBOCOP: Python-based Robotic Control & Optimization Package for Manipulation
-
- , "PYROBOCOP: Python-based Robotic Control & Optimization Package for Manipulation", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA46639.2022.9812069, May 2022.BibTeX TR2022-057 PDF Video Software
- @inproceedings{Raghunathan2022may,
- author = {Raghunathan, Arvind and Jha, Devesh K. and Romeres, Diego},
- title = {{PYROBOCOP: Python-based Robotic Control \& Optimization Package for Manipulation}},
- booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2022,
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICRA46639.2022.9812069},
- isbn = {978-1-7281-9681-7},
- url = {https://www.merl.com/publications/TR2022-057}
- }
- , "PYROBOCOP: Python-based Robotic Control & Optimization Package for Manipulation", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA46639.2022.9812069, May 2022.
-
MERL Contact:
-
Research Area:

Abstract:
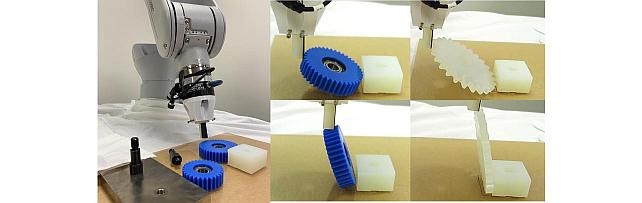
PYROBOCOP is a Python-based package for con-trol, optimization and estimation of robotic systems described by nonlinear Differential Algebraic Equations (DAEs). In par-ticular, the package can handle systems with contacts that are described by complementarity constraints and provides a gen-eral framework for specifying obstacle avoidance constraints. The package performs direct transcription of the DAEs into a set of nonlinear equations by performing orthogonal collocation on finite elements. PYROBOCOP provides automatic reformu-lation of the complementarity constraints that are tractable to NLP solvers to perform optimization of robotic systems. The package is interfaced with ADOL-C [1] for obtaining sparse derivatives by automatic differentiation and IPOPT [2] for performing optimization. We evaluate PYROBOCOP on several manipulation problems for control and estimation.
Software & Data Downloads
Related News & Events
-
NEWS Invited talk at The Penn State Seminar Series on Systems, Control, and Robotics. Date: October 20, 2022
Where: University Park, PA
Research Areas: Artificial Intelligence, Control, RoboticsBrief- Devesh Jha, a Principal Research Scientist in the Data Analytics Group at MERL, delivered an invited talk at The Penn State Seminar Series on Systems, Control and Robotics. This talk presented some of the recent work done at MERL in the areas of optimization and control for robotic manipulation in unstructured environment.
-
NEWS MERL researchers presented 5 papers and an invited workshop talk at ICRA 2022 Date: May 23, 2022 - May 27, 2022
Where: International Conference on Robotics and Automation (ICRA)
MERL Contacts: Stefano Di Cairano; Siddarth Jain; Pedro Miraldo; Daniel N. Nikovski; Arvind Raghunathan; Abraham P. Vinod; Yebin Wang
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- MERL researchers presented 5 papers at the IEEE International Conference on Robotics and Automation (ICRA) that was held in Philadelphia from May 23-27, 2022. The papers covered a broad range of topics from manipulation, tactile sensing, planning and multi-agent control. The invited talk was presented in the "Workshop on Collaborative Robots and Work of the Future" which covered some of the work done by MERL researchers on collaborative robotic assembly. The workshop was co-organized by MERL, Mitsubishi Electric Automation's North America Development Center (NADC), and MIT.
Related Video
Related Publication
- @article{Raghunathan2022mar,
- author = {Raghunathan, Arvind and Jha, Devesh K. and Romeres, Diego},
- title = {{PYROBOCOP: Python-based Robotic Control \& Optimization Package for Manipulation}},
- journal = {arXiv},
- year = 2022,
- month = mar,
- doi = {10.48550/arXiv.2106.03220},
- url = {https://arxiv.org/abs/2106.03220}
- }