TR2023-087
Meta-Learning of Neural State-Space Models Using Data From Similar Systems
-
- , "Meta-Learning of Neural State-Space Models Using Data From Similar Systems", World Congress of the International Federation of Automatic Control (IFAC), DOI: 10.1016/j.ifacol.2023.10.1843, July 2023.BibTeX TR2023-087 PDF Software
- @inproceedings{Chakrabarty2023jul,
- author = {Chakrabarty, Ankush and Wichern, Gordon and Laughman, Christopher R.},
- title = {{Meta-Learning of Neural State-Space Models Using Data From Similar Systems}},
- booktitle = {World Congress of the International Federation of Automatic Control (IFAC)},
- year = 2023,
- month = jul,
- doi = {10.1016/j.ifacol.2023.10.1843},
- url = {https://www.merl.com/publications/TR2023-087}
- }
- , "Meta-Learning of Neural State-Space Models Using Data From Similar Systems", World Congress of the International Federation of Automatic Control (IFAC), DOI: 10.1016/j.ifacol.2023.10.1843, July 2023.
-
MERL Contacts:
-
Research Areas:


Abstract:
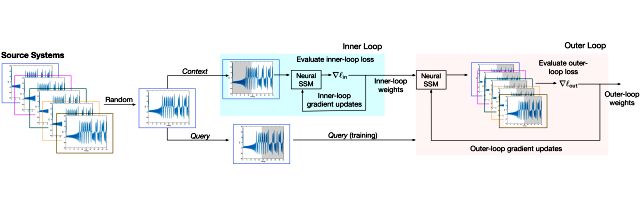
Deep neural state-space models (SSMs) provide a powerful tool for modeling dynamical systems solely using operational data. Typically, neural SSMs are trained using data collected from the actual system under consideration, despite the likely existence of operational data from similar systems which have previously been deployed in the field. In this paper, we propose the use of model-agnostic meta-learning (MAML) for constructing deep encoder network-based SSMs, by leveraging a combination of archived data from similar systems (used to meta-train offline) and limited data from the actual system (used for rapid online adaptation). We demonstrate using a numerical example that meta-learning can result in more accurate neural SSM models than supervised- or transfer-learning, despite few adaptation steps and limited online data. Additionally, we show that by carefully partitioning and adapting the encoder layers while fixing the state-transition operator, we can achieve comparable performance to MAML while reducing online adaptation complexity.
Software & Data Downloads
Related News & Events
-
NEWS Ankush Chakrabarty gave a lecture at UT-Austin's Seminar Series on Occupant-Centric Grid-Interactive Buildings Date: March 20, 2024
Where: Austin, TX
Research Areas: Artificial Intelligence, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, OptimizationBrief- Ankush Chakrabarty, Principal Research Scientist in the Multiphysical Systems Team, was invited to speak as a guest lecturer in the seminar series on "Occupant-Centric Grid Interactive Buildings" in the Department of Civil, Architectural and Environmental Engineering (CAEE) at the University of Texas at Austin.
The talk, entitled "Deep Generative Networks and Fine-Tuning for Net-Zero Energy Buildings" described lessons learned from MERL's recent research on generative models for building simulation and control, along with meta-learning for on-the-fly fine-tuning to adapt and optimize energy expenditure.
- Ankush Chakrabarty, Principal Research Scientist in the Multiphysical Systems Team, was invited to speak as a guest lecturer in the seminar series on "Occupant-Centric Grid Interactive Buildings" in the Department of Civil, Architectural and Environmental Engineering (CAEE) at the University of Texas at Austin.
-
NEWS MERL presents 9 papers at 2023 IFAC World Congress Date: July 9, 2023 - July 14, 2023
MERL Contacts: Scott A. Bortoff; Stefano Di Cairano; Christopher R. Laughman; Abraham P. Vinod
Research Areas: Control, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, RoboticsBrief- MERL researchers presented 9 papers and organized 2 invited/workshop sessions at the 2023 IFAC World Congress held in Yokohama, JP.
MERL's contributions covered topics including decision-making for autonomous vehicles, statistical and learning-based estimation for GNSS and energy systems, impedance control for delta robots, learning for system identification of rigid body dynamics and time-varying systems, and meta-learning for deep state-space modeling using data from similar systems. The invited session (MERL co-organizer: Ankush Chakrabarty) was on the topic of “Estimation and observer design: theory and applications” and the workshop (MERL co-organizer: Karl Berntorp) was on “Gaussian Process Learning for Systems and Control”.
- MERL researchers presented 9 papers and organized 2 invited/workshop sessions at the 2023 IFAC World Congress held in Yokohama, JP.
-
NEWS Keynote address given by Philip Orlik at 9th annual IEEE Smartcomp conference Date: June 26, 2023
Where: International Conference on Smart Computing (SMARTCOMP), Vanderbilt University, Nashville, Tennessee
MERL Contact: Philip V. Orlik
Research Areas: Communications, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Signal ProcessingBrief- VP & Research Director, Philip Orlik, gave a keynote titled, "Smart Technologies for Smarter Buildings" at the 9th edition of the IEEE International Conference on Smart Computing (SMARTCOMP) focusing on some of the research challenges and opportunities that arise as we seek to achieve net-zero emissions in Smart building environments.
SMARTCOMP is the premier conference on smart computing. Smart computing is a multidisciplinary domain based on the synergistic influence of advances in sensor-based technologies, Internet of Things, cyber-physical systems, edge computing, big data analytics, machine learning, cognitive computing, and artificial intelligence.
- VP & Research Director, Philip Orlik, gave a keynote titled, "Smart Technologies for Smarter Buildings" at the 9th edition of the IEEE International Conference on Smart Computing (SMARTCOMP) focusing on some of the research challenges and opportunities that arise as we seek to achieve net-zero emissions in Smart building environments.