TR2013-031
Point-Plane SLAM for Hand-Held 3D Sensors
-
- , "Point-Plane SLAM for Hand-Held 3D Sensors", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2013.6631318, May 2013, pp. 5182-5189.BibTeX TR2013-031 PDF Software
- @inproceedings{Taguchi2013may,
- author = {Taguchi, Y. and Jian, Y.-D. and Ramalingam, S. and Feng, C.},
- title = {{Point-Plane SLAM for Hand-Held 3D Sensors}},
- booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2013,
- pages = {5182--5189},
- month = may,
- doi = {10.1109/ICRA.2013.6631318},
- issn = {1050-4729},
- isbn = {978-1-4673-5641-1},
- url = {https://www.merl.com/publications/TR2013-031}
- }
- , "Point-Plane SLAM for Hand-Held 3D Sensors", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2013.6631318, May 2013, pp. 5182-5189.
-
Research Areas:
Abstract:
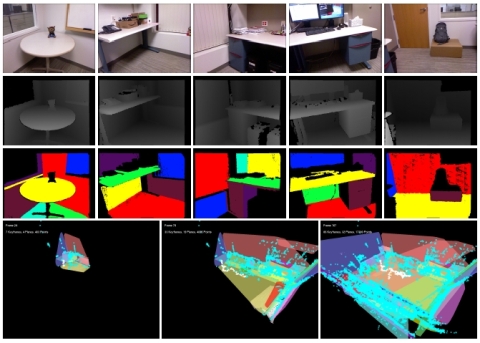
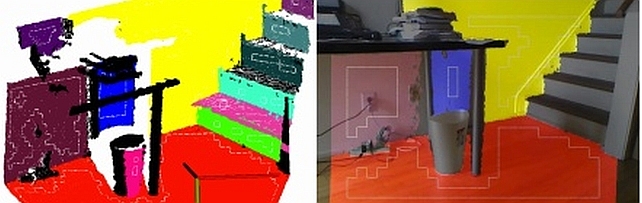
We present a simultaneous localization and mapping (SLAM) algorithm for a hand-held 3D sensor that uses both points and planes as primitives. We show that it is possible to register 3D data in two different coordinate systems using any combination of three point/plane primitives (3 planes, 2 planes and 1 point, 1 plane and 2 points, and 3 points). Our algorithm uses the minimal set of primitives in a RANSAC framework to robustly compute correspondences and estimate the sensor pose. As the number of planes is significantly smaller than the number of points in typical 3D data, our RANSAC algorithm prefers primitive combinations involving more planes than points. In contrast to existing approaches that mainly use points for registration, our algorithm has the following advantages: (1) it enables faster correspondence search and registration due to the smaller number of plane primitives; (2) it produces plane-based 3D models that are more compact than point-based ones; and (3) being a global registration algorithm, our approach does not suffer from local minima or any initialization problems. Our experiments demonstrate real-time, interactive 3D reconstruction of indoor spaces using a hand-held Kinect sensor.
Software & Data Downloads
Related News & Events
-
NEWS ICRA 2013: publication by Yuichi Taguchi, Srikumar Ramalingam and others Date: May 14, 2013
Where: IEEE International Conference on Robotics & Automation (ICRA)
Research Area: Computer VisionBrief- The paper "Point-Plane SLAM for Hand-Held 3D Sensors" by Taguchi, Y., Jian, Y-D, Ramalingam, S. and Feng, C. was presented at the IEEE International Conference on Robotics & Automation (ICRA).